Descrizione dell'applicazione
CONTROLLO GRADO DI COTTURA
ED ASPETTO ESTETICO SU FETTE BISCOTTATE
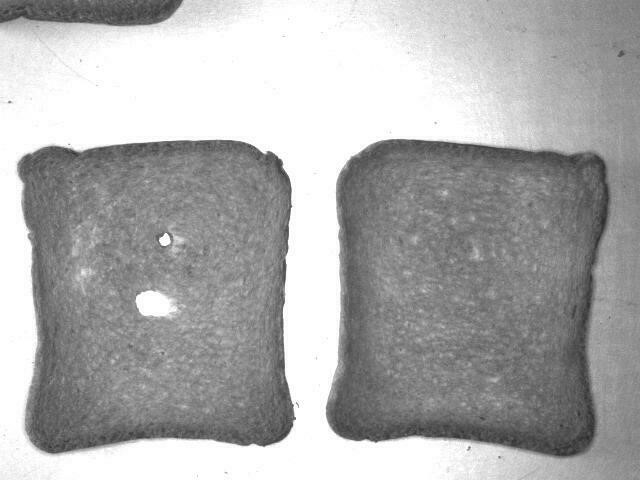
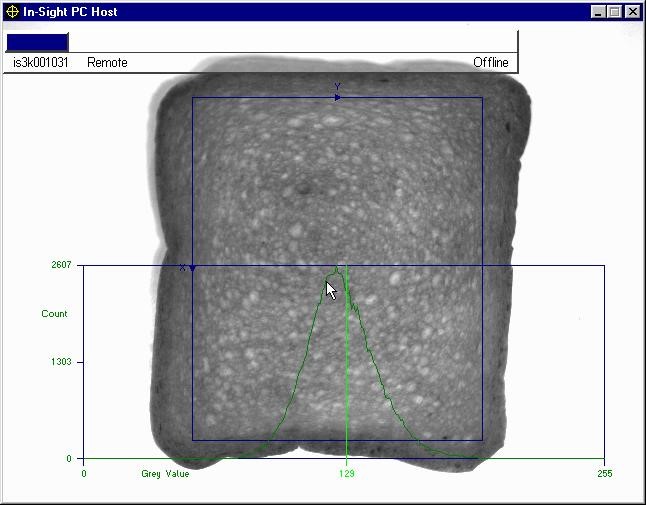
In una linea di produzione di fette biscottate, deve essere inserito un controllo automatico relativo all’aspetto estetico del prodotto. Attualmente il controllo avviene a mezzo di operatori che valutano in modo esclusivamente “soggettivo” se l’aspetto del prodotto è congruo con l’aspetto “atteso” dal consumatore. La richiesta pervenutaci consisteva nella realizzazione di un sistema in grado di valutare sia i parametri “geometrici” del prodotto che quelli estetici relativi al grado di cottura ed alla presenza/assenza di “buchi di lievitazione” sulla fetta biscottata.